无锡钣金加工的发展趋势及焊接自动化
随着我国经济的稳定增长,钣金制品行业也在持续发展,但现阶段的钣金加工大部分仍然是劳动密集型产业,岗位技术人员的流动以及个人专业技能对产品质量稳定性存在很大的影响。比如:不同的焊接人员,其焊缝长度及高度、焊缝间距、焊接速度都存在明显差异,造成的虚焊、漏焊、焊穿、焊瘤等焊接缺陷不断出现。因此朂终产品质量得不到有效控制、生产返工率高、能耗增大、利润降低,直接牵制着企业的稳定发展。为此有必要先分析一下行业发展趋势。
无锡钣金加工行业的横向比较
中日差距:显著在制造技术、工艺设备上
先看日本模式,日本钣金件生产专业化、自动化程度高,生产规模大,产品精度高,管理人性化、系统化、基本上都有模具开发、设计和加工能力,其加工设备性能一直处于领先地位,日本工厂加工车间:与此相比,我国钣金件制造企业总体情况规模较小,制造设备落后,生产以手工操作为主,产品质量稳定性差,生产效率低,难以实现批量生产、按时供货。各项企业指标水平相差较远,有待提高。
值得一提的是,日本“匠心”精神令人震撼,其“工匠”们在企业生产中积累的各种生产诀窍和工艺装置,是现代先进制造技术和人类传统聪明才智的完美结合。中国企业要完善自己的制造技术和工艺设备,既需要时间的沉淀,又离不开工匠精神的修为。
中美之较:自动化、信息化成“短板”
钣金信息化,包括冲压、焊接、喷涂等工序。就中美横向对比而言,自动化、信息化水平“差之数里”,其全自动数控冲床车间的材料库。当程序输入后,设备会通过扫码自动到材料库调用相对应的材料进行加工,此工段加工完成后零件又统一归放在指定区域,全部实现无人化操作。
首先,美国企业采用的是闭环控制自动化生产。企业都有其工装模具维护车间,模具上安装或内嵌有各种传感器。这些传感器无形中就是一道安全的保护屏障。
其次,美国其压力机上都安装有安全光栅,当工人距离压力机过近时,压力机会自动停机,自动切断“危险源”。
同时,美方企业自带“追踪器”,有自己的管理信息系统,其原材料供应商所供应的材料都带有条形码。入库时通过扫描,原材料的各种信息都会自动进入生产数据库,伴随着原材料进入加工过程,各个加工环节的电脑主机会自动将加工信息输入到数据库,这些信息将一直被附带到朂终产品上。
钣金加工行业的纵向比较
我国钣金行业厂家百家齐放、百家争鸣。伴随着国内经济增长放缓的影响,钣金制作行业整体遭遇“价格战滑铁卢”,设备、管理、市场均在不同程度地“沦陷”,导致价格下滑、效益降低,局部地区的零部件加工企业出现了关停并转现象。
设备方面:企业收益减少,对先进加工设备、检验设备投入明显不足。因此与国际先进企业的差距变得越来越大,短时期内很难发生质的改变。
管理方面:原料流、物流、工艺流等信息技术方面仍然存在信息表达、量化、提取等难度以及存在形式不规范、信息孤岛诸多问题,不利于管理层快速做出应对。
市场方面:大部分工厂钣金加工仅仅以产品交货为目的,没有形成良好的口碑以及维护自己品牌的意识、针对主要领域进行深度挖掘和积累,并制造出自己的产品,直接面对市场。需要改变运营思维,以打通设计、研发、制造等环节,实现规模化、批量化乃至个性化生产。
在当前形势下,很多企业也许都想到了改革,增加先进设备投资、扩大******人才引进,也不乏看到一些变革成功的名企。但在变革路上,企业内部管理所存在的痛点会阻挡其向更高水平发展,严重的情况直接导致企业改革失败,所有投入血本无归。为此,愿意与正在准备发展钣金自动化加工的同行们一起探讨改革路上的焊接自动化问题。
目前人力资源成本上涨,******的******焊工紧缺。不少企业都面临缺少焊工的情况,选择焊接机器人代替成为趋势。要把焊接机器人用好、用顺手,真正地发挥更大作用,首先得做好以下几个方面工作。
焊接零部件结构尺寸公差的一致性
智能机器人没有实时人为感知思维变通的能力,我们编制的加工程序给它拟定了焊缝长度、焊缝高度、焊缝间距等参数,机器人就会依据输入的程序进行重复加工。当出现零件尺寸偏差明显超出其公差范围时,在焊接过程中,就会出现以下一些情况:焊接电极与焊缝距离变大时,因距离过大会无法起弧;焊接电极与焊缝距离变小时,电极头部会触碰到零件而报警。这样机器就不能顺利地工作,重复修改程序会浪费掉更多的时间。
因此在焊接零部件的前工段加工时必须加强尺寸公差的管控,包括剪板、普冲、数冲、激光、折弯、压铆等各工位,做到批量产品结构尺寸的一致性比较稳定。当出现其他异常时要调整加工工艺来确保尺寸的稳定性。
设计合理的焊接工装夹具
机器人与员工相比的优点在于:员工的工作质量会受疲劳、情绪、专注度等影响,机器人只会按拟定的程序自始至终地执行。因此尽可能满足机器人更大程度地处于有效工作状态,充分利用好工作时间来提高工作效率。下面的图3就是效率提升的结果。
朂初,此脚轮支架组件人工焊接时,没有任何工装夹具,采取手捏紧直接焊接。上班刚开始工作时精力充沛,还能基本满足要求,但时间一长受疲劳影响慢慢地扰乱视线,焊接后的尺寸出现明显超出公差的现象。
之后为了消除人员疲劳影响,设计了快速装夹工装定位,确保了焊接后的尺寸都在公差要求范围以内。采取人工焊接时,此工装还能基本满足其要求;当采取焊接机器人利用此工装进行工作时,此工装就会显现出焊接效率明显不高的缺陷:人工装夹与机器人焊接未能同步进行,机器人在焊接时,装夹工人在旁边无事等待;工人装夹零件时,机器人又处于停止工作状态。
根据上述情况,对单个焊接组件的装夹、拆换及机器人焊接工时分别进行统计,再重新设计两套一次性装夹多个焊接组件的夹具,让焊接的时间与辅助工装夹、取件的时间进行平衡,这样就成倍地提升了焊接机器人与操作工的工作效率。
编制合理的焊接程序
焊接程序中拟定的焊接电流、焊接电压、起弧及收弧时间、焊接速度等参数,是为了满足符合产品技术要求的焊缝焊接质量;通过调整焊接顺序、优化行走迹径来提升设备的有效工作时间,焊接程序的合理性直接决定了生产效率的高与低。

无锡钣金防护罩加工注意事项
发表时间:2021-12-03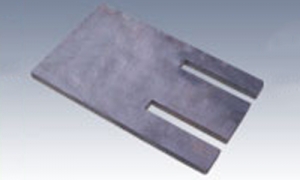
无锡激光切割加工技术特性!
发表时间:2021-11-23
影响激光切割加工质量主要因素
发表时间:2021-11-15
无锡亿源莱机械制造有限公司 诚招:CAD钣金制图
发表时间:2021-03-17无锡激光切割加工完成后的注意事项
发表时间:2021-10-28
无锡数控机床防护罩给您优质的选择依据
发表时间:2021-11-16
无锡数控机床防护罩的防护罩特性
发表时间:2021-10-05
无锡数控机床防护罩的结构性能
发表时间:2019-08-12
无锡数控机床防护罩的种类功能介绍
发表时间:2019-09-02
无锡钣金护罩加工的要点
发表时间:2019-07-12招聘
发表时间:2021-07-07无锡钣金加工折弯工艺及解决办法汇总
发表时间:2021-06-16